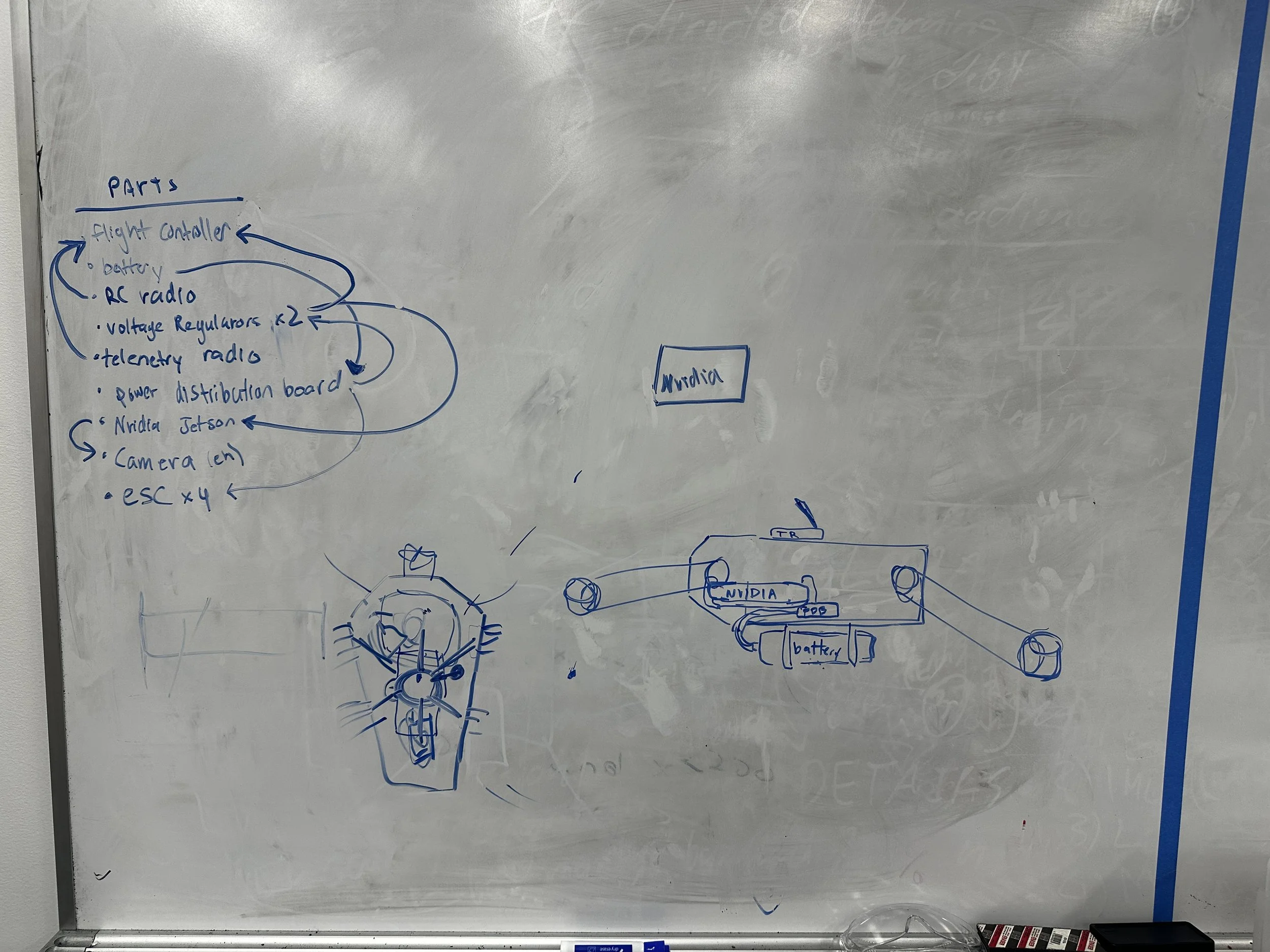
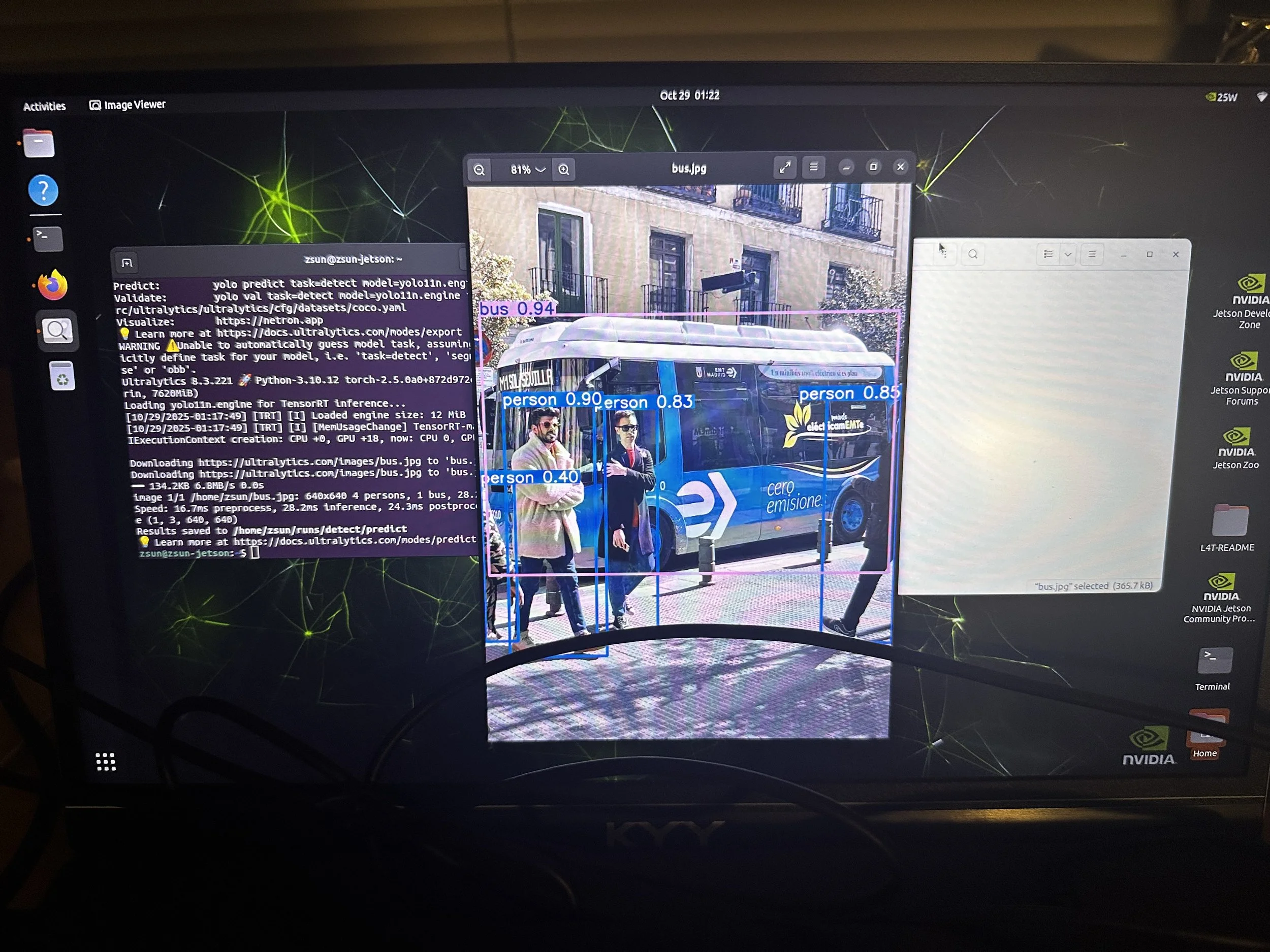
I led a team of five students in the creation of a YOLOV11 powered machine learning drone. The drone is equipped with an NVIDIA Jetson Orin and a Pixhawk 2.4.8 flight controller working in tandem to enable the drone to identify and track its target.
I trained the custom YOLOV11 algorithm to improve detect times by 300% by limiting the identification parameters to only people and creating an algorithm to skip compute on stagnant frames. I integrated this algorithm with the NVIDIA Jetson to enable fully onboard computing.
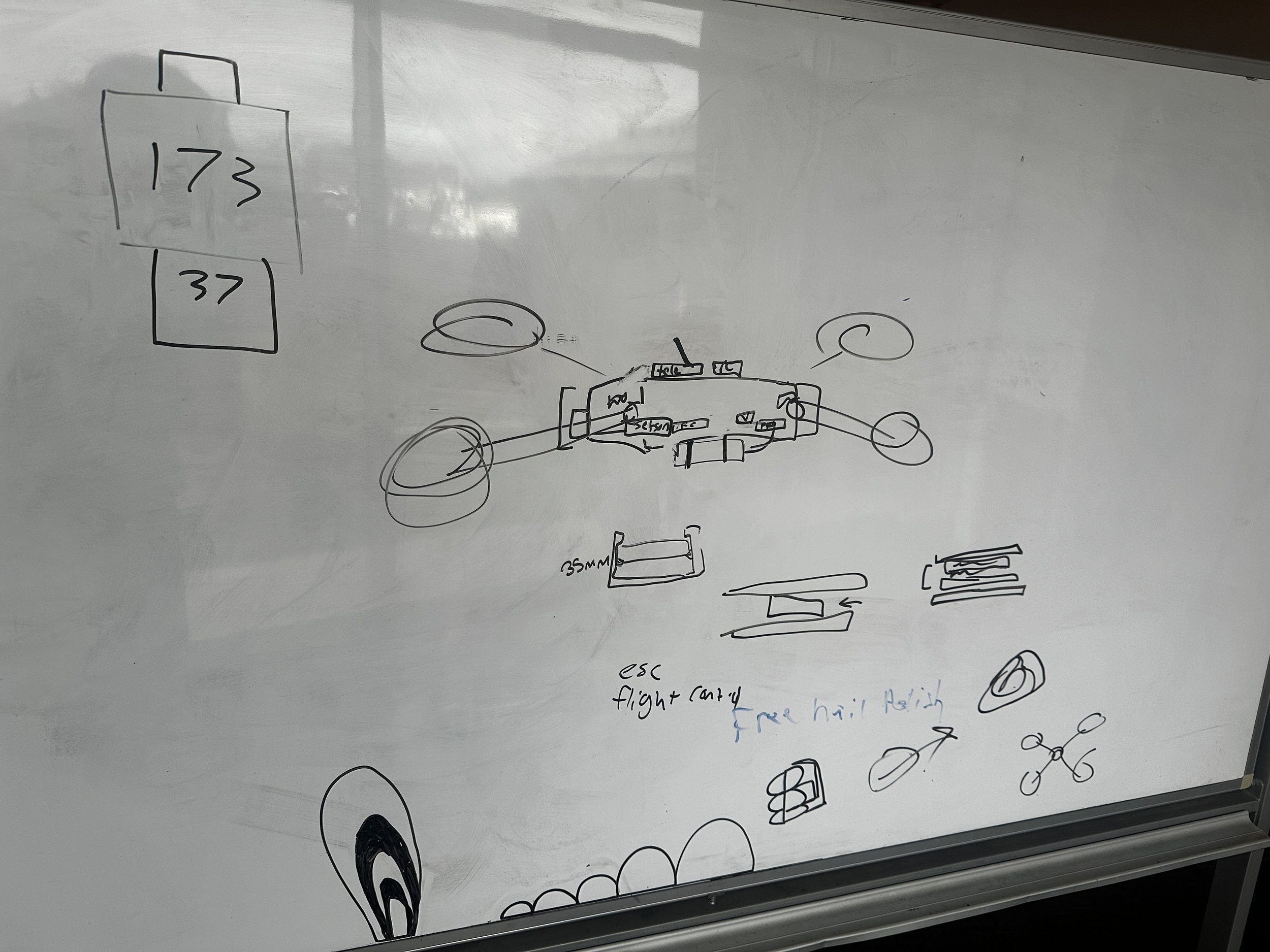
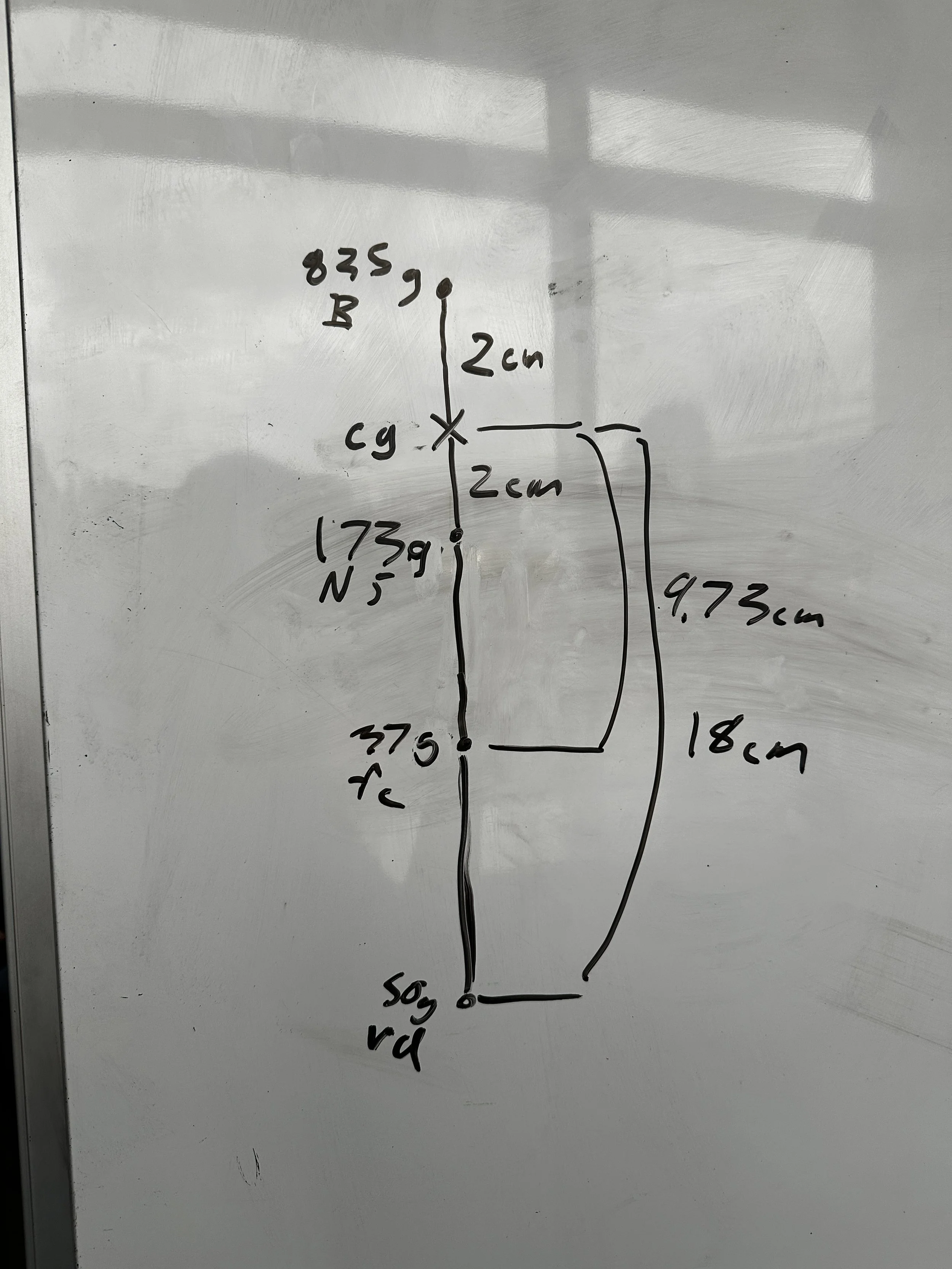
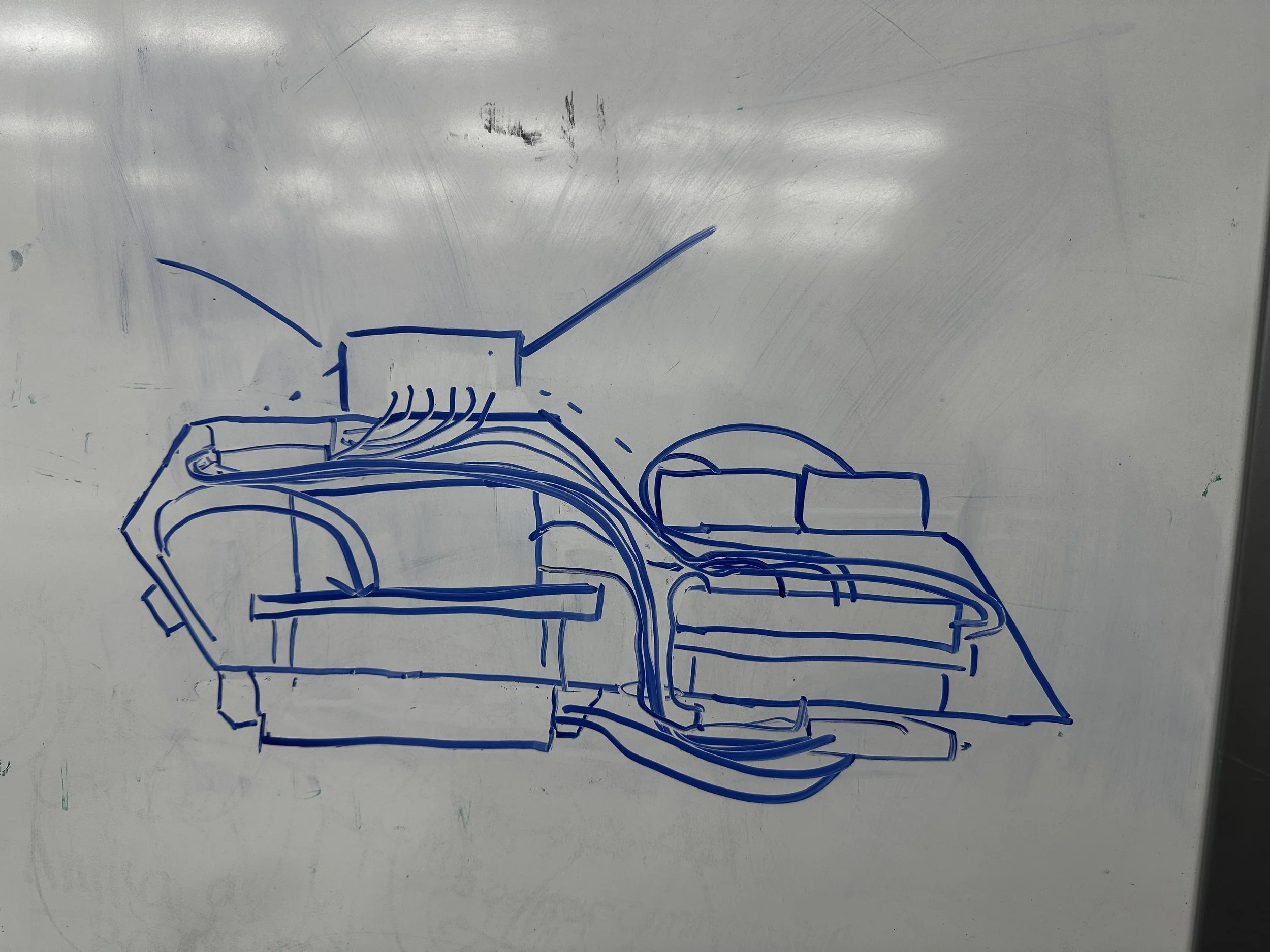
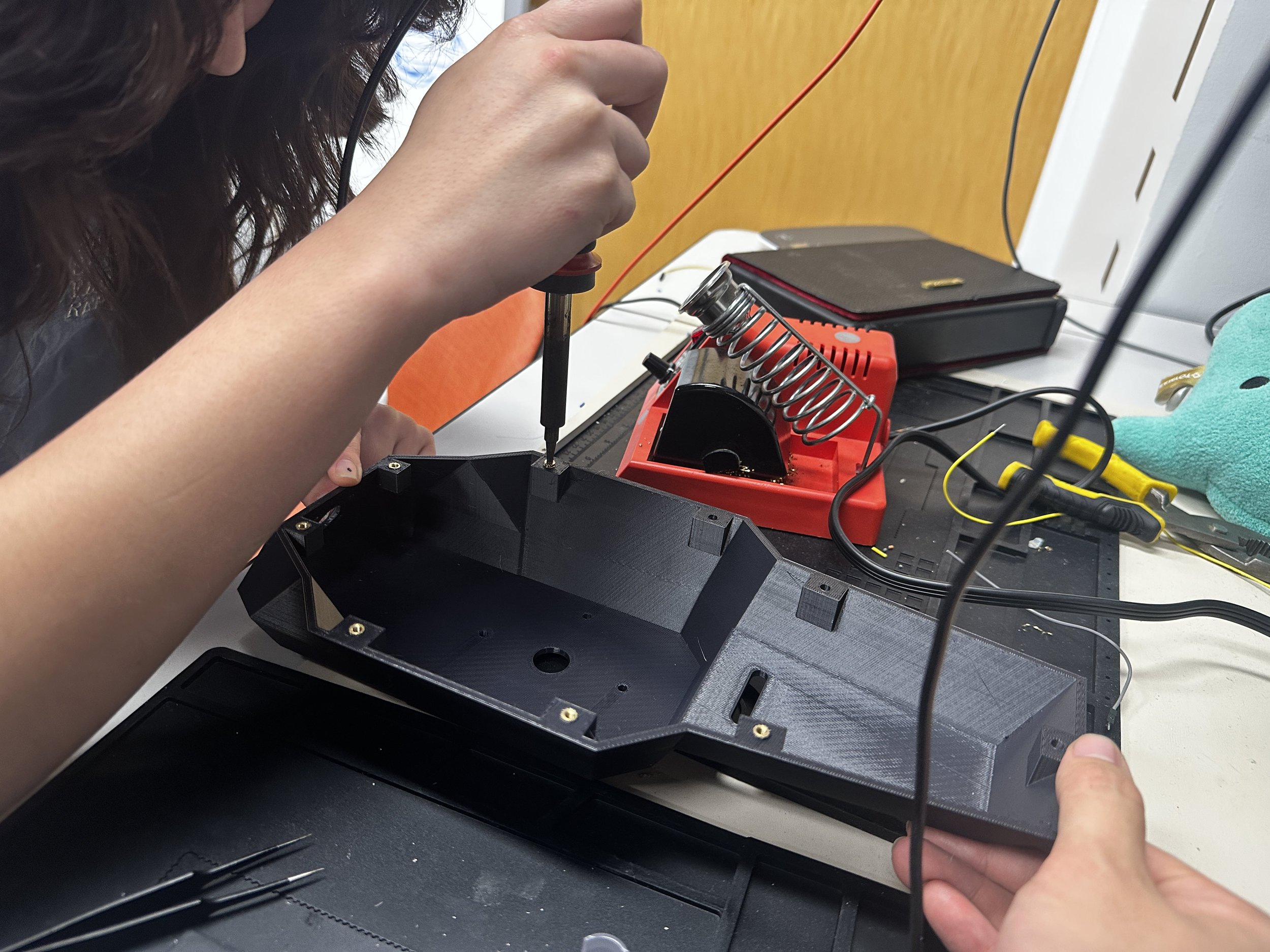
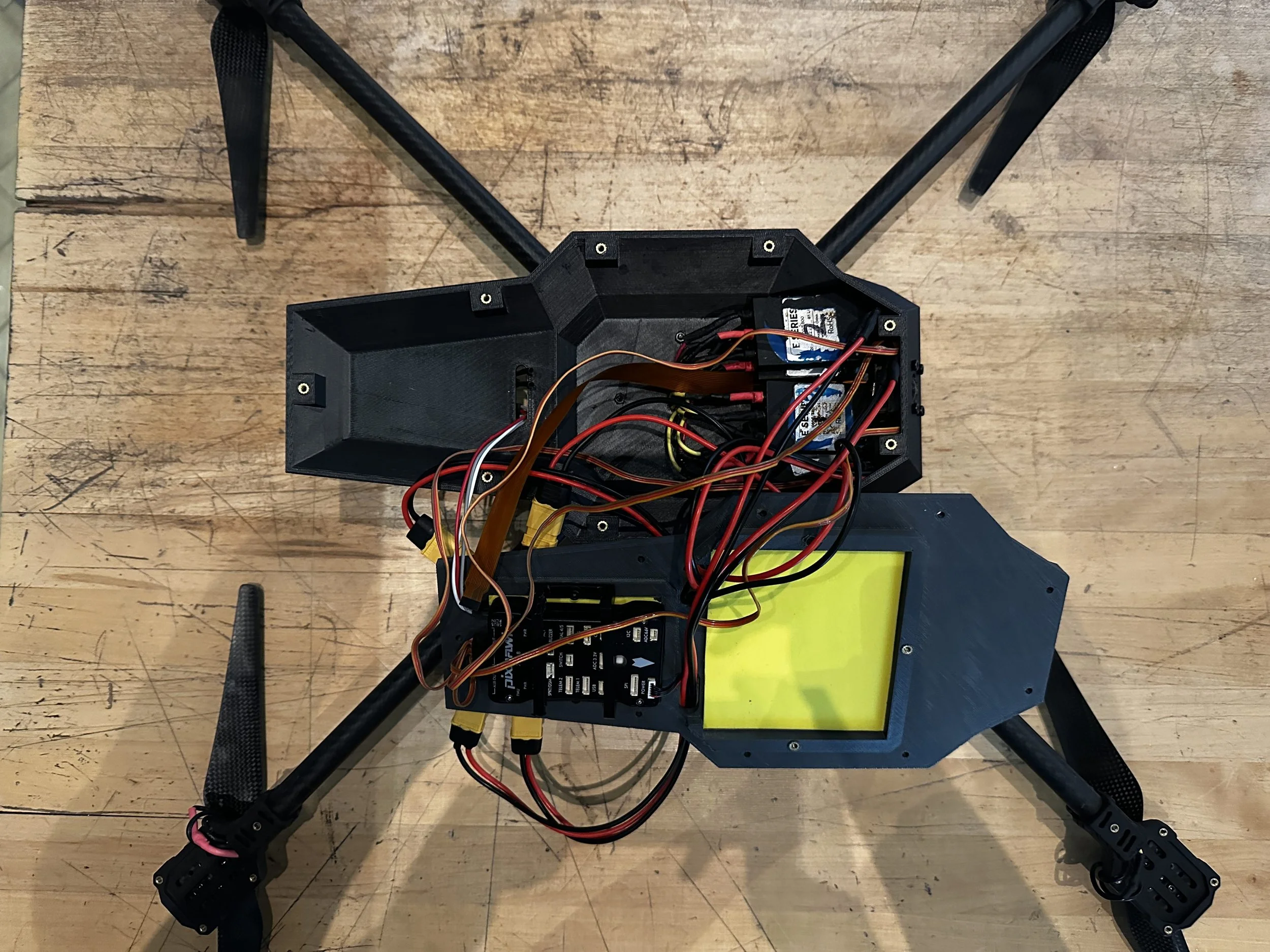
I also designed the drone chassis to house all electronic hardware. To begin I did center of mass calculations to determine the optimal placement for each hardware component to ensure that the drone is perfectly balanced. After finding each component placement location, I designed a vibration isolated mount and enclosure for the Jetson, flight controller, and camera.
In addition to designing the drone chassis and integrating the YOLOV11 algorithm with the flight controller, I additionally repurposed old DJI E600 motors and flight controllers to stay within our $250 budget. To utilize these motors I needed to troubleshoot electrical issues with insufficient amperage and incorrect connections between ESCs and the flight controller.
You can read more about this project on the GitHub website we created for class: https://aeveical.github.io/pie-2025-03/index.html
This project is currently in progress and I will update this page as it continues. All team members have agreed to continue work and we plan to add additional features to the drone.
Machine Learning Recording Drone