Line Following Robot
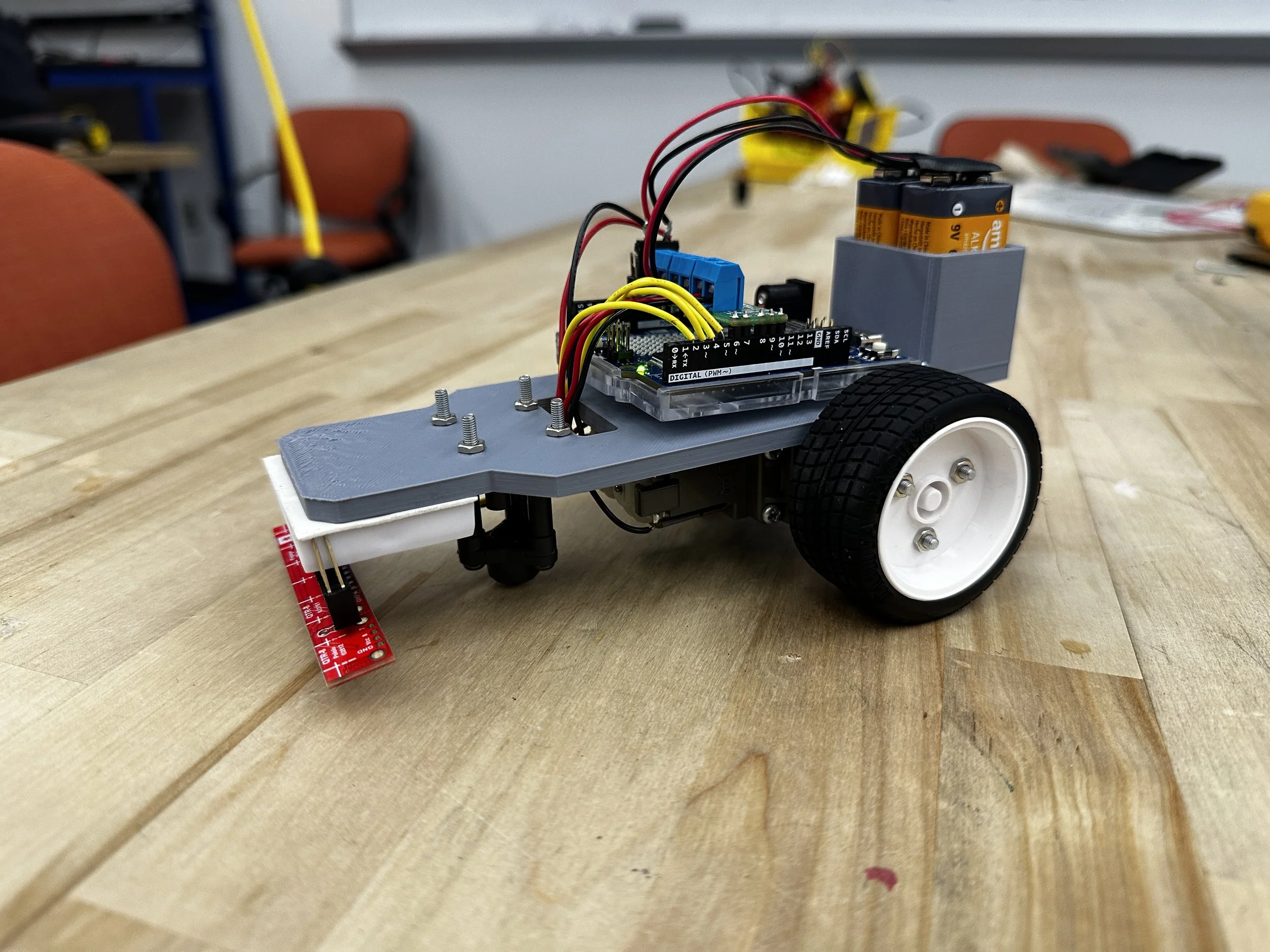
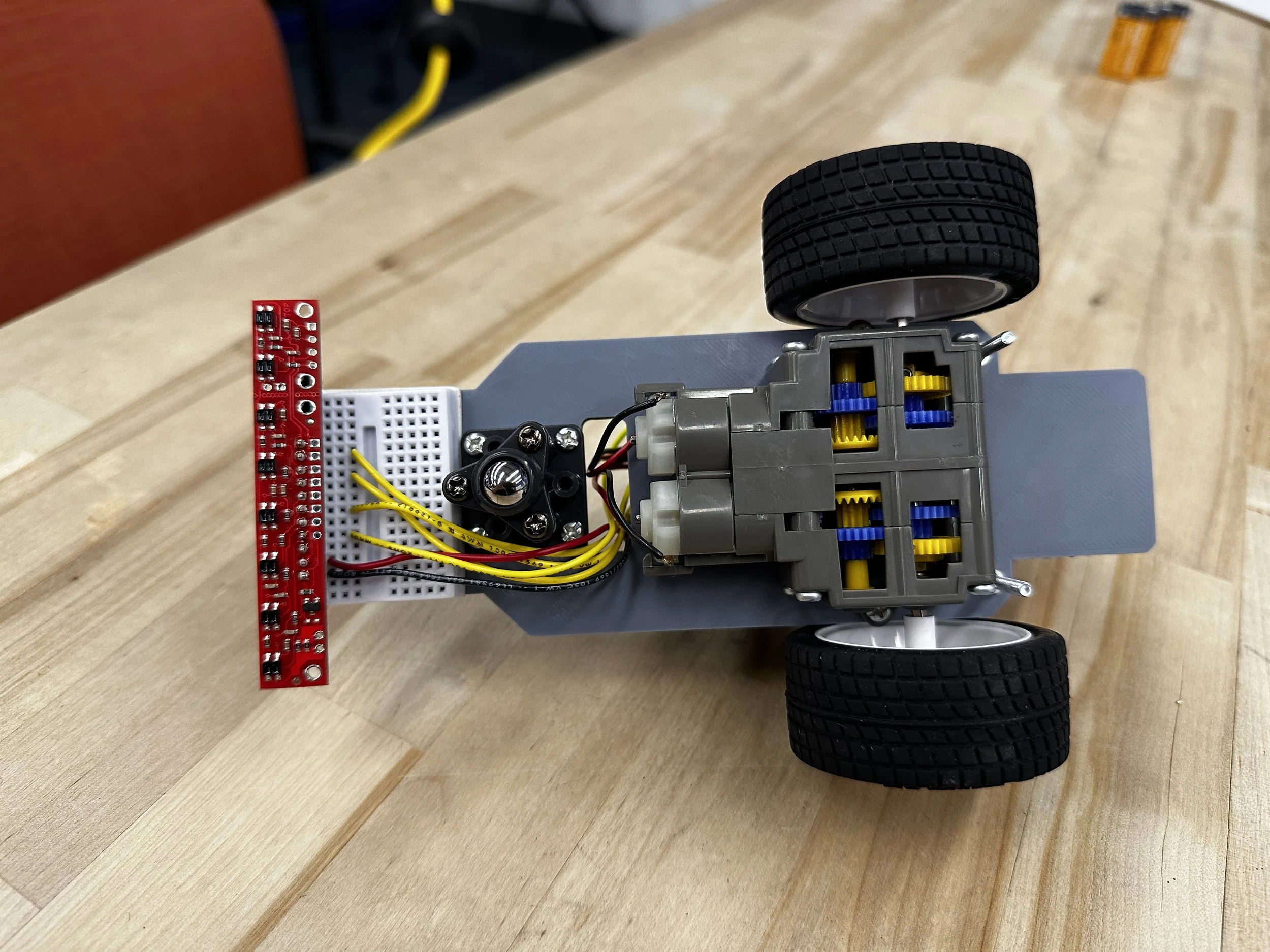
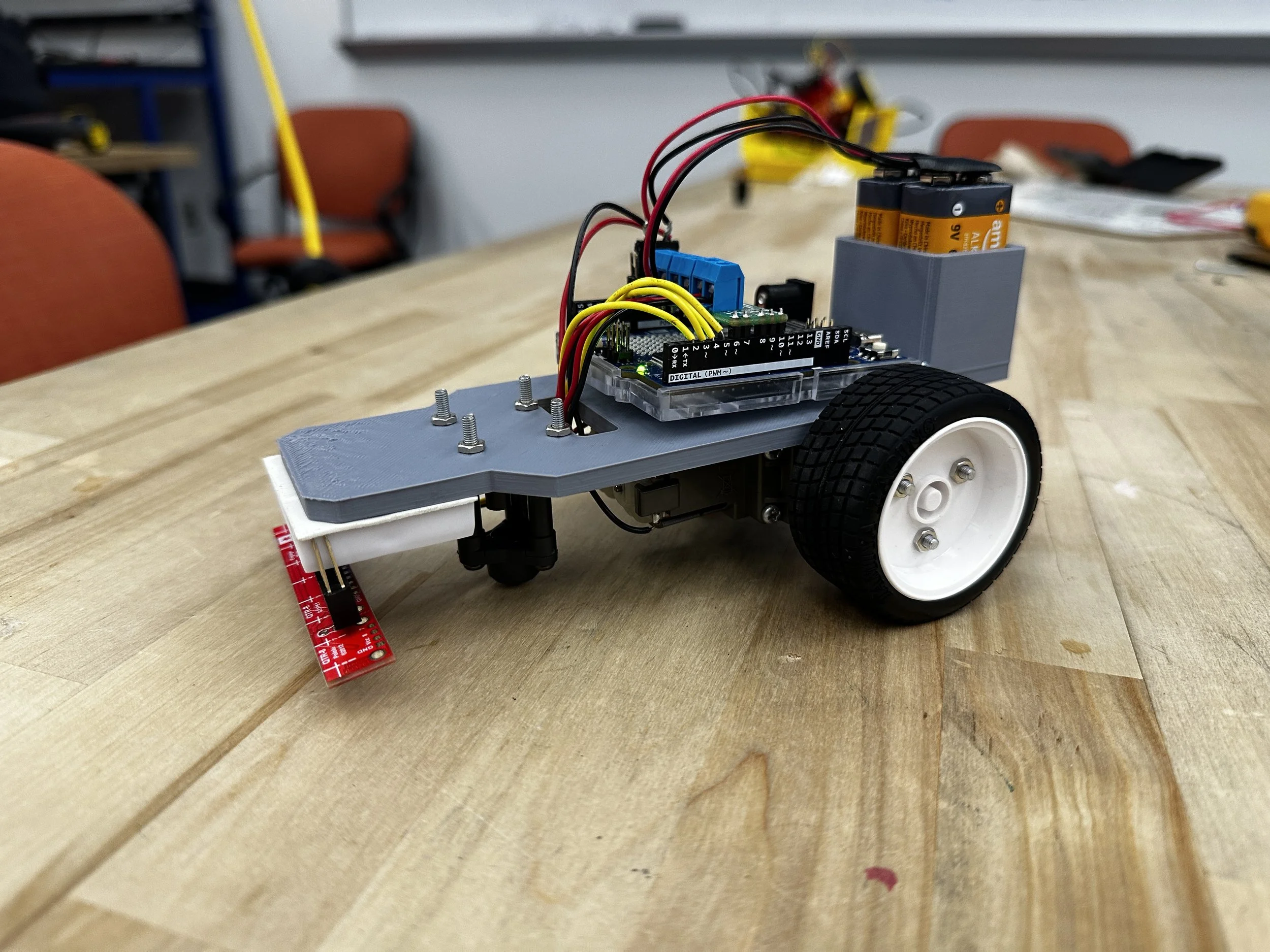
I created a line following robot that uses a live tuned PID controller to follow an obstacle course. The mechanical design of the robot was relatively simple as the 3D printed chassis was created solely to ensure that all electronic and hardware components had sufficient mounting. For the sensing input of the robot, four IR sensors on the QTR-8RC sensor array are used. Each of the sensors are assigned an error value, with the ones on the outside being positive or negative 3 and the inner sensors being positive or negative 1. The total error value at any given step is the sum of the errors of each sensor detecting the line. The error value is then processed to produce the integral and derivative components of the PID controller and multiplied by the Kp, Ki, and Kd constants to create a turning value to be input to each motor.
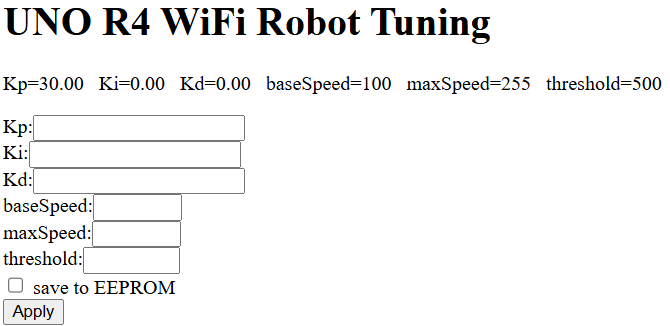
To create fully wireless tuning I hosted a web server off the onboard Arduino R4 Wifi to have a simple interface to tune each value on the fly.